 Temperatur
Temperatur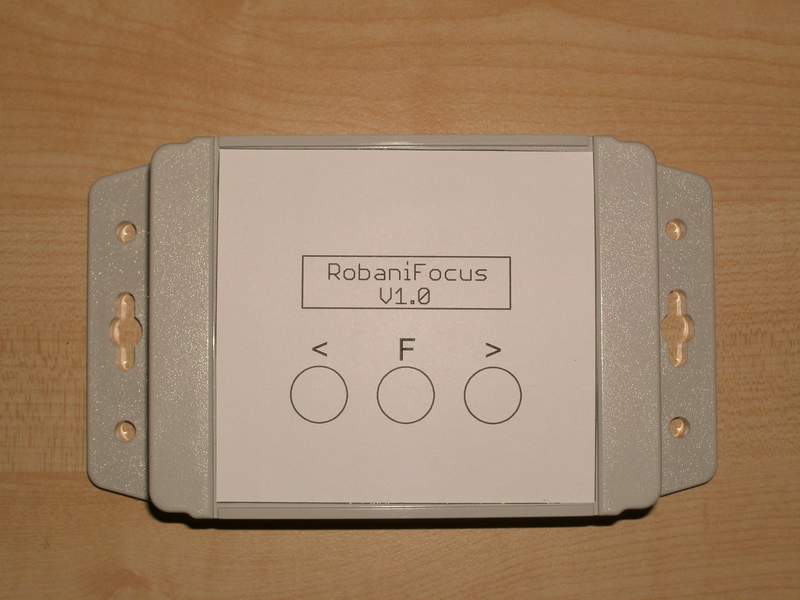
| Motorfokus ROBANI Technische Vorgaben: | |||
| Hardware: | Typ: |
Bemerkungen: |
Anschlüsse: |
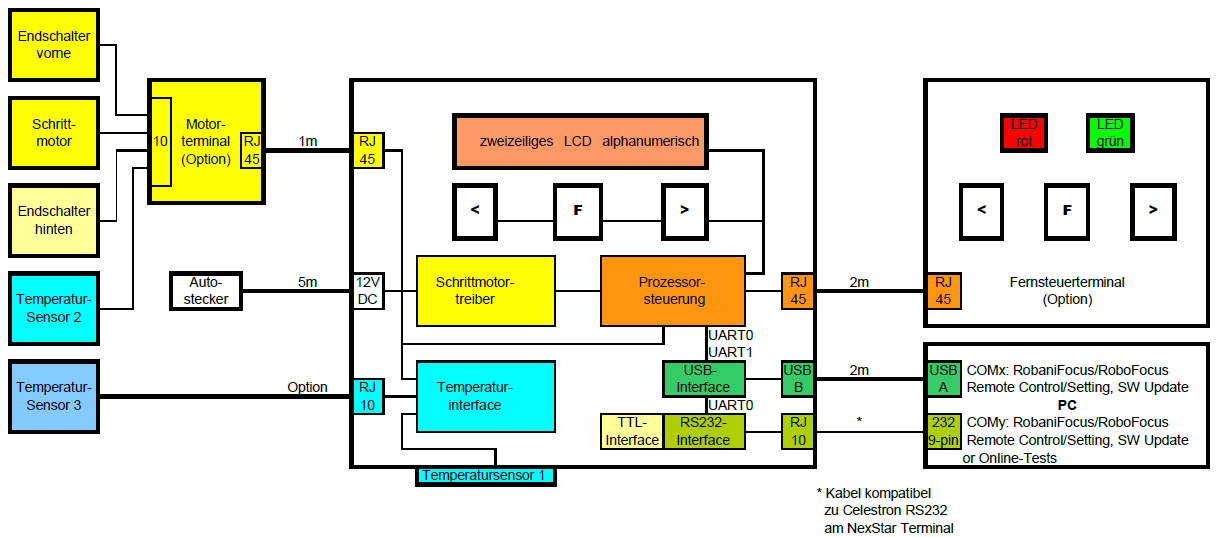
| Versorgungsspannung | Schaltregler | Erzeugung der internen 5VDC | 12VDC Autostecker |
| PC-Schnittstelle 1 | USB2.0 | Umsetzung auf COM-Port (COMx) | USB TypB |
| PC-Schnittstelle 2 | RS232 | Umsetzung auf COM-Port (COMy) | RS232 RJ10 (Celestron Type) |
| Microcontroller | Atmega2561 | 14,74MHz RISC Prozessor (256kBytes FLASH) | keine, im Gehäuse |
| Parameterspeicher | 25LC320A | SPI 32 kByte (Konfigurationsspeicher) | keine, im Gehäuse |
| Schrittmotortreiber | A3967 | Microstepping Driver/Translator +-800mA | keine, im Gehäuse |
| USB Schnittstelleninterface | FT230 | FTDI USB 2.0 Serial Interface | keine, im Gehäuse |
| Anzeige Werte, Menü | Text LCD 2-zeilig | rot, dimmbar (PWM) bis ganz dunkel (aus) | keine, im Gehäuse |
| Bedienung (Menü, Betrieb) | 3 Tasten am Gehäuse | Menü: - , Enter, +, Betrieb: <, F, > | keine, am Gehäuse |
| Akustische Meldungen | Piezzo Buzzer | Piezzo Beeper mit integriertem Oszillator | keine, im Gehäuse |
| Fernbedienungsanschluss | digital, direkt | 2LED's: rot, grün (PWM), 3 Tasten: <, F, > | RJ45 (8-polig), |
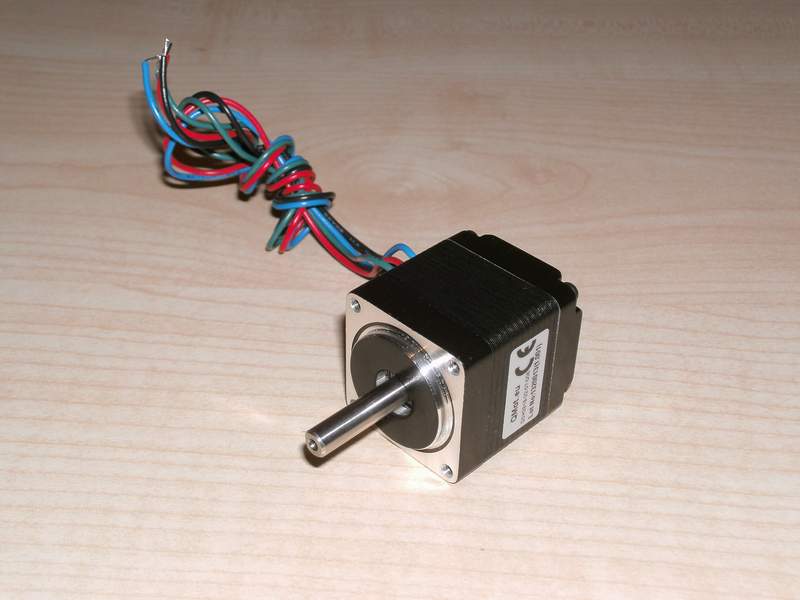
| Motoranschluss | Stepper, 2-Phasen | Schrittmotor, Endschalter 1+2 (2 = Option) | RJ45 (8-polig), mit KTY81(2) im Motorterminal (Option) |
| Temperatursensor 1 | KTY81, SOD70 | Umgebungstemperatur (Aussentemperatur) | keine, im Gehäuse |
| Temperatursensor 2 | KTY81, Röhrchentyp | Auszugtemperatur (Montage am Auszug) | RJ45 (8-polig) Anschluss im Motorterminal |
| Temperatursensor 3 | KTY81, SOD70 oder Röhrchentyp | Tubustemperatur (Montage am Tubus) | RJ10 (4-polig) mit KTY81(3) im Sensor Extern (Option) |
| Software: | Funktionen: |
Bemerkungen: |
Programmtyp (Funktion): |
| PC: ASCOM Protokoll | Protokoll-Translater | PC-Anbindung an bestehende Programme | Standardisiertes Astro Protokoll |
| PC: RobaniFocusProtokoll© | Kommunikation zum PC | COMxy: Anbindung an RobaniFocus SW | Serial ASCII Protocol (Remote oder Online) |
| PC: RobaniFocusPanel© | Kommunikation zum PC | COMy: Settings, Service und Test via PC | Serial ASCII Protocol (Entwicklung, Tests via Hyperterminal) |
| PC: Bootloader | Kommunikation zum PC | COMxy: SW-Update via PC (download vom PC) | Serial ASCII Protocol (Software Update) |
| PC: Remote Control | Bedienung via PC | COMxy: Bedienung und Parametereingabe | RobaniFocusControl (GUI) |
| Sprachen zur Bedienung | Sprachauswahl | Englisch, Deutsch, Französisch, Italienisch, Spanisch | Menüauswahl / RobaniFocusProtokoll© |
| Baudraten zum PC | wählbar nur am PC | 9600, 19200, 57600 Baud | RobaniFocusProtokoll©, RobaniFocusPanel©, Bootloader |
| Betriebssystem | Real-Time-Execute | RTX Eigenentwicklung (RobaniX©) | in Prozessor-FLASH |
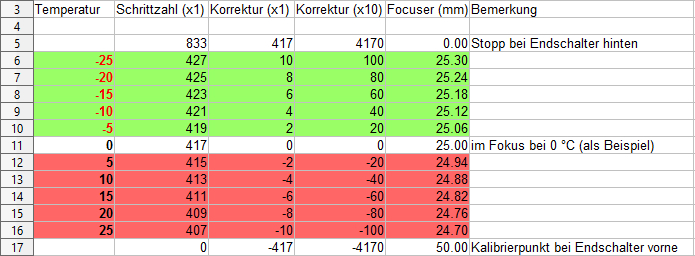
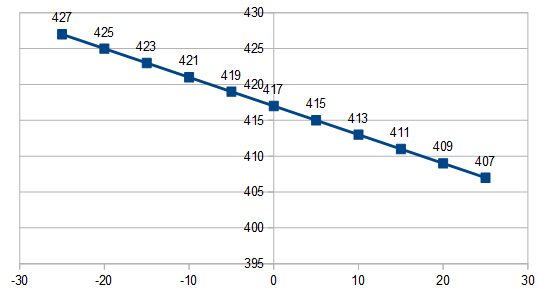
| Selbsttestzyklus | für Motorsteuerung | Automatische Kalibierfahrten | Kalibrierung über Endschalter (1, 2) |
| Fokus-Regler (Temperatur) | einstellbar pro Sensor und Kombinationen | Parameter für Reglerreaktionen (z.B. x10) | für Untersetzung am Auszug |
| Temperaturquelle(n) | wählbar | 1 von 3 Sensoren oder Kombination 2+3 | Umgebung(1), Auszug(2), Tubus(3) |
| Korrekturtabellen (lernen) | für jeden Sensor und Kombinationen | für mehrere Teleskope bzw. Konfigurationen | im EEPROM ausfallsicher gespeichert |
| Anzeigemodus am LCD: | Anzeigewerte dimmbar: |
Funktionen: |
Aktionen: |
| Systemstart | SW-Version, Modus | Start, Menü: Parameter Anzeige, Eingabe | Start durch F (ENTER) oder ins Menü durch: -, + |
| Selbsttestzyklus | Kalibrierfahrt und Schrittanzeige | Eingriff nur bei Störung mit beliebiger Taste | keine, automatisch zu Standby, mit Taste zu Systemstart (Abbruch) |
| Bereit | Standby, Schritt- und Temperaturanzeige(n) | vorwärts oder rückwärts mit Tasten: <, >, (+F) | Start mit F (ENTER) oder ins Menü durch: -, + |
| Betriebsanzeige (offline) | Betrieb, Schritt- und Temperaturanzeige(n) | Motorposition, Temperatur(en) in 0.1°C | Korrekturen: mit Tasten: <, >, (+F) oder Abbruch mit F (zu Standby) |
| Betriebsanzeige (online) | Online, Schrittanzeige Schnittstelle COMx | Motorposition, PC-Kommandos | Abbruch mit F oder via PC (ESC) zu Standby |
| Anzeigemodus an der Fernbedienung: | LED Anzeigen dimmbar: |
Funktionen: |
Aktionen: |
| Systemstart | LED rot und grün blinken | Start, Menü: Parameter Anzeige, Eingabe | Start durch F (ENTER) oder ins Menü durch: -, + |
| Selbsttestzyklus | Drehrichtung: rot oder grün | Eingriff nur bei Störung mit beliebiger Taste | keine, automatisch zu Standby, mit Taste zu Systemstart (Abbruch) |
| Standby | LEDs ein (bei Stillstand) | vorwärts oder rückwärts mit Tasten: <, >, (+F) | Start mit F (ENTER) oder ins Menü durch: -, + |
| Betriebsanzeige (offline) | Drehrichtung: rot oder grün wenn aktiv | Motorkorrekturen rückwärts oder vorwärts | Korrekturen: mit Tasten: <, >, (+F) oder Abbruch mit F (zu Standby) |
| Betriebsanzeige (online) | Drehrichtung: rot oder grün wenn aktiv | Motorkorrekturen rückwärts oder vorwärts | Abbruch mit F oder via PC (ESC zu Standby) |